Movement No. 41 presents a wide-face single helical gear — the second of two helical gear examples in the 507 Mechanical Movements collection, following the narrower helical gear of Movement No. 40. Both share the same fundamental principle: the teeth are cut at an oblique angle — a helix angle — to the gear’s rotational axis, rather than straight across as in ordinary spur gears. As Henry T. Brown states, this oblique tooth geometry gives a more continuous bearing than ordinary spur gears. The key distinction of No. 41 is its significantly wider tooth face. In a single helical gear, the oblique teeth engage progressively across the face width — one edge of the tooth makes contact first, and the contact zone sweeps across the full width of the tooth as rotation continues. In a narrow helical gear (No. 40), this sweep is short and the improvement over straight spur gears, while real, is limited. In a wide-face helical gear (No. 41), the contact line sweeps across a much greater distance, meaning that for an even larger portion of each rotation, multiple tooth pairs are simultaneously sharing the load. This results in even smoother power transmission, greater load capacity, reduced vibration, and quieter operation compared to narrower helical gears. The wider face does, however, generate a proportionally larger axial thrust force along the shaft axis, requiring robust thrust bearings to be incorporated into the shaft support design. The wide-face helical gear represents the practical optimum of single helical gear design — maximizing the smoothness and load-sharing benefits of oblique tooth geometry while remaining manufacturable as a single continuous helical tooth form.
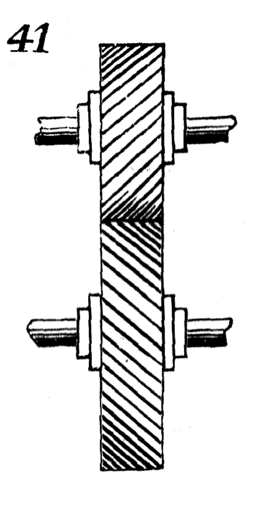
40 and 41. Rotary converted into rotary motion. The teeth of these gears, being oblique, give a more continuous bearing than ordinary spur-gears.