Movement No. 40 presents the helical spur gear — a direct and important evolution of the ordinary straight-toothed spur gear of Movement No. 24. While both types transmit rotary motion between parallel shafts, the helical gear achieves this with a fundamentally different and superior tooth geometry: instead of teeth cut parallel and straight across the face of the gear, helical gear teeth are cut at an oblique angle — a helix angle — to the gear’s axis of rotation. This seemingly small geometric change produces several profound engineering advantages. Most importantly, as Henry T. Brown notes, the oblique teeth give a more continuous bearing than ordinary spur gears. In a straight spur gear, each tooth pair engages and disengages abruptly along a line contact — the full tooth width comes into contact almost simultaneously, producing an impulse-like load and the characteristic noise associated with spur gears. In a helical gear, by contrast, each tooth begins engagement at one edge and gradually comes into full contact across its width in a progressive, rolling manner as the gears rotate. This gradual engagement means that at any given moment, multiple teeth are partially engaged simultaneously, distributing the load more evenly and smoothly. The result is dramatically quieter operation, higher load-carrying capacity for the same tooth size, and significantly reduced vibration — making helical gears the preferred choice in automotive transmissions, industrial gearboxes, and any application where quiet, smooth, high-power operation is required. The trade-off is that the oblique tooth geometry generates an axial thrust force along the shaft that must be accommodated by appropriate thrust bearings — a limitation that the double-helical (herringbone) gear of Movement No. 41 is specifically designed to eliminate.
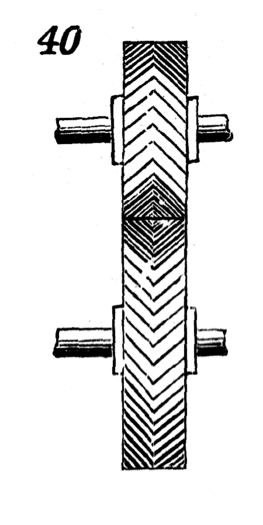
40 and 41. Rotary converted into rotary motion. The teeth of these gears, being oblique, give a more continuous bearing than ordinary spur-gears.