#063 Jumping Star Wheel – 507 Mechanical Movements 3D Animation
Saturday, Apr 11, 2026
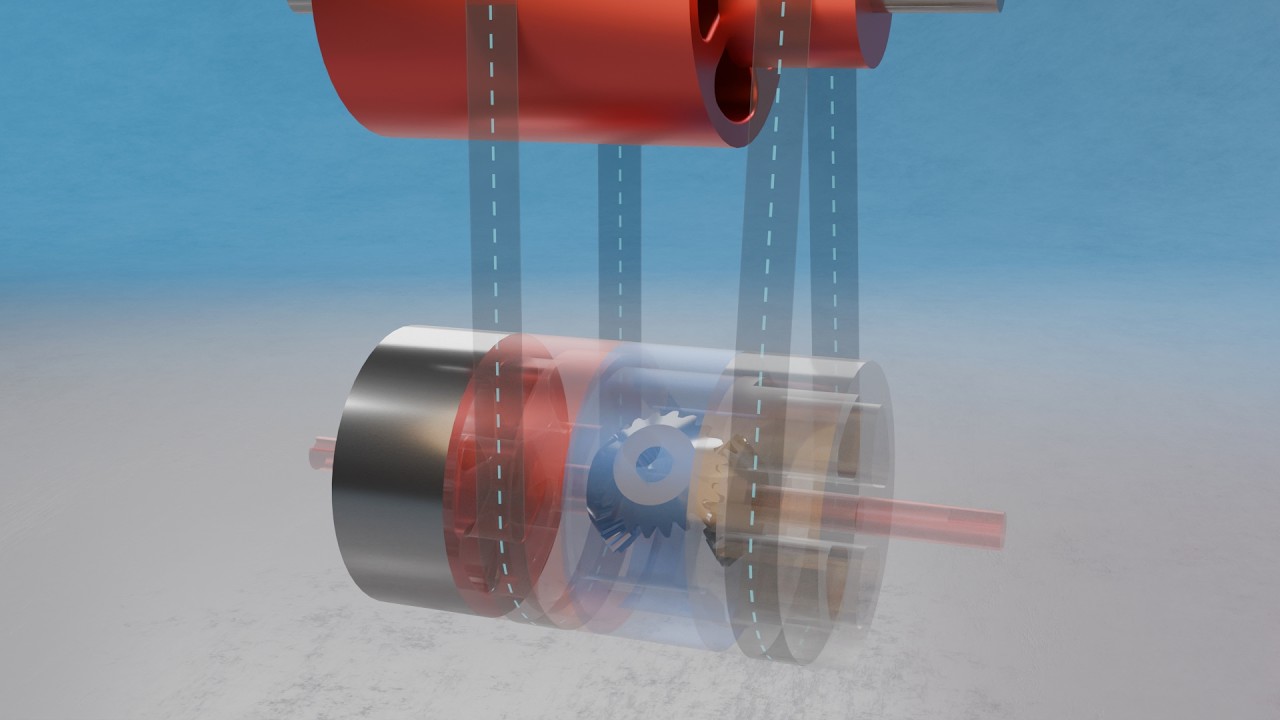
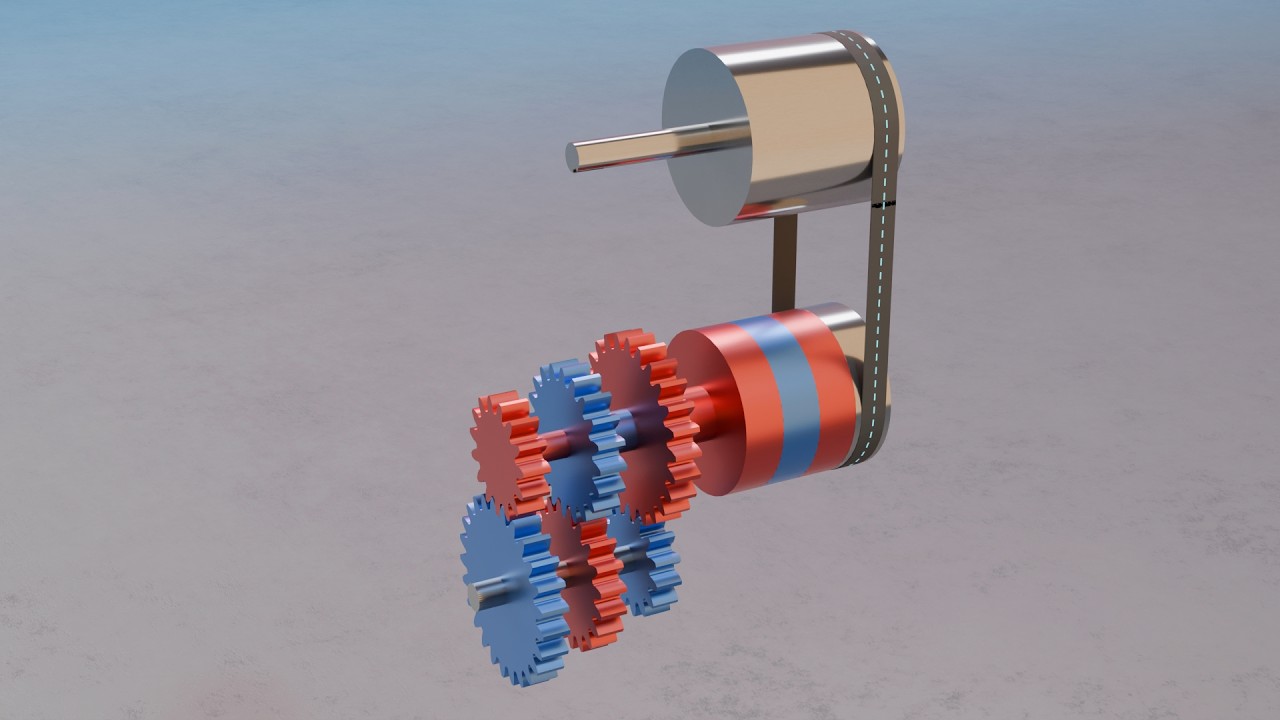
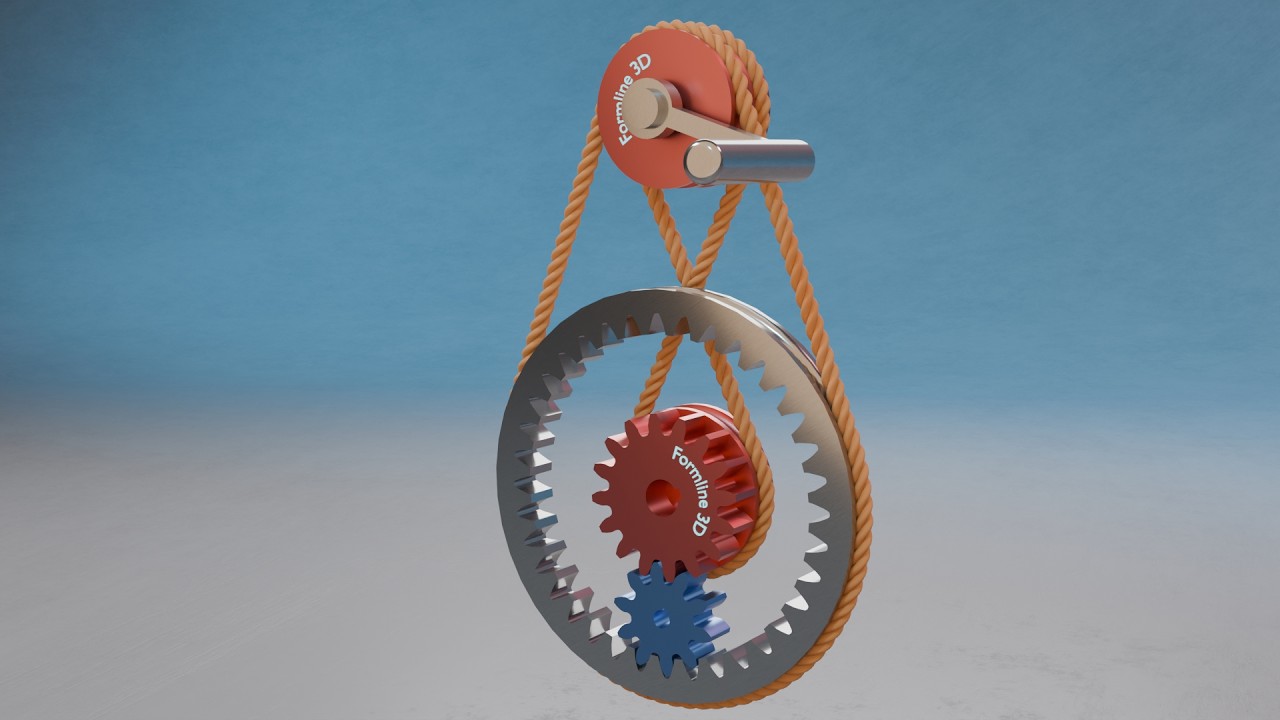
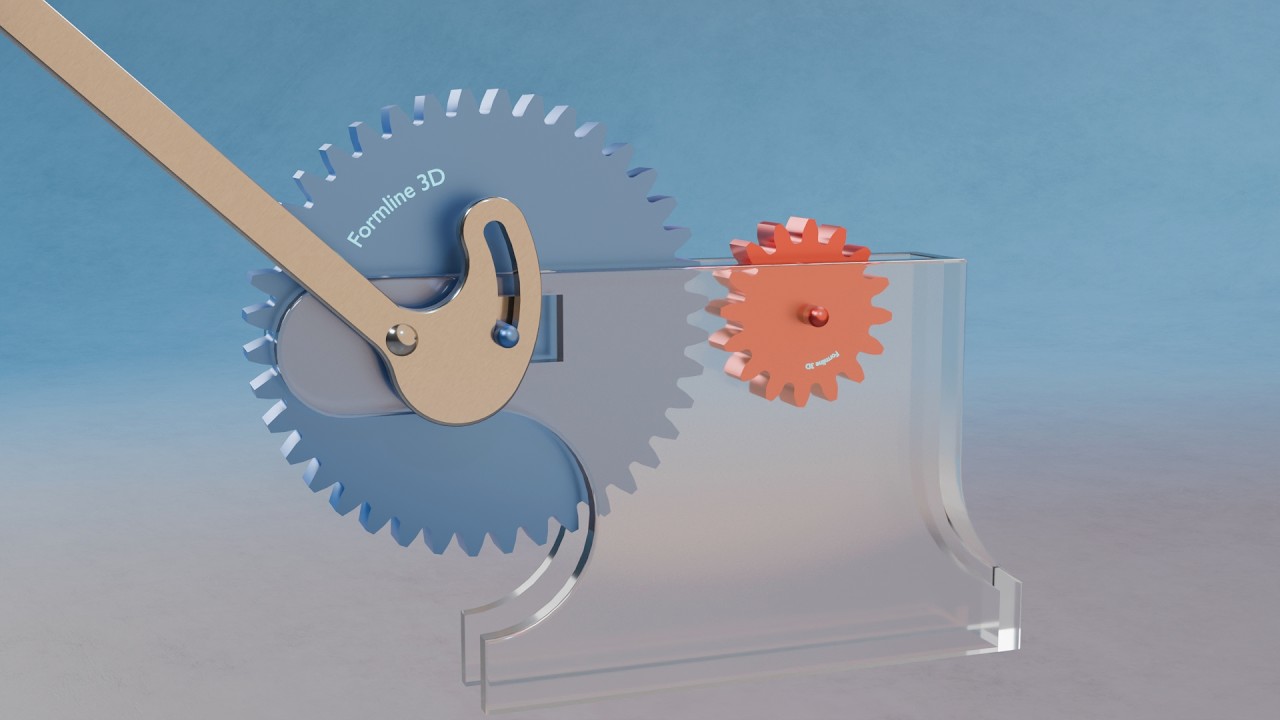
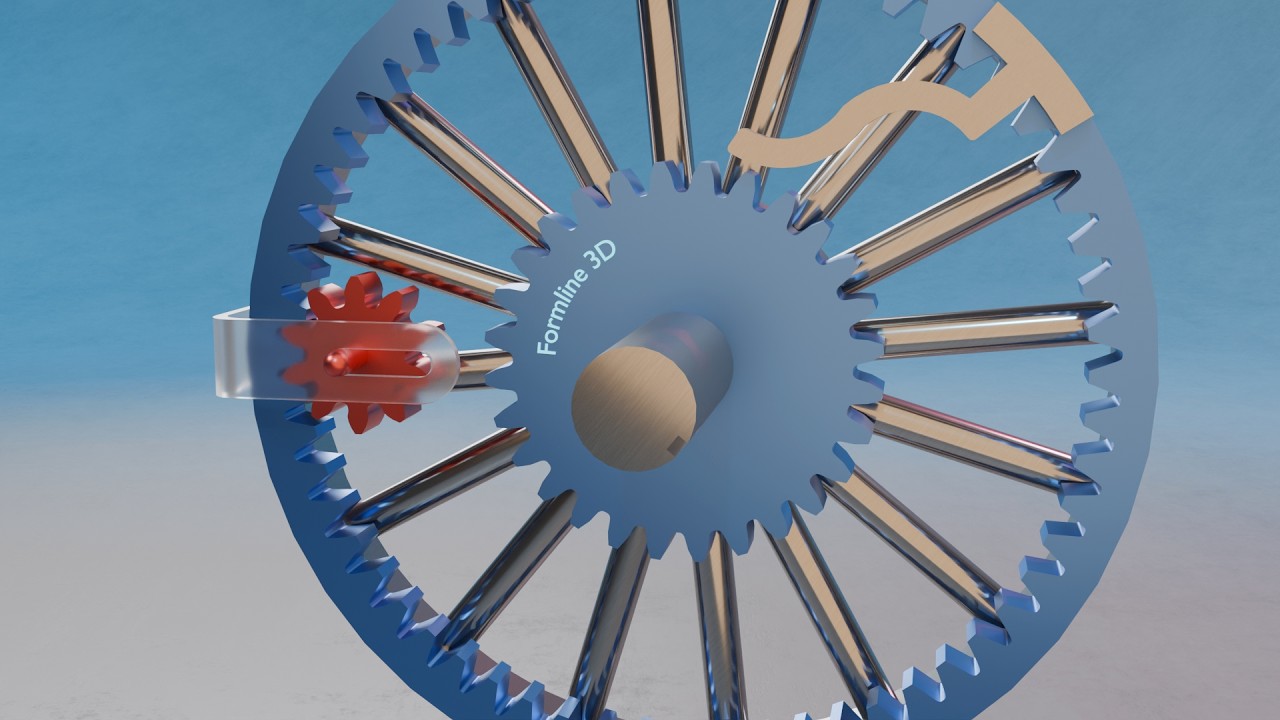
Movement No. 63 presents a beautifully precise intermittent motion mechanism — the jumping star wheel with drop pawl and spring — historically used in meters, revolution counters, and counting devices where a rapid, sharp, and exactly indexed rotary advance is needed once per input cycle. The mechanism has three key components working in sequence. First, a continuously rotating disk on the right carries a series of pins projecting from its face at regular intervals around its circumference. Second, a drop arm is mounted to the left, held up by a spring, with a pawl attached to it that rests in the spaces between the star-wheel’s points. Third, a star-wheel with evenly spaced pointed projections waits to be advanced. The sequence of operation is as follows: as the disk rotates, one of its pins lifts the drop arm — and with it, the attached pawl — upward against the spring force. As the pin continues rotating past the drop arm, the pawl is first released from the pin’s grip and drops into the next space of the star-wheel, positioning itself ready to push. The pin then continues to the drop arm’s catch point and releases it suddenly — the spring violently throws the drop arm downward. The drop arm carries a pin that strikes the pawl, which instantly delivers a sharp, rapid impulse to the star-wheel, advancing it one precise step. The star-wheel then stops and holds its position until the next disk pin repeats the cycle. This snap-action mechanism produces a crisp, well-defined, single-step advance of the star-wheel for each pin on the rotating disk — exactly the sharp, precise indexing needed for reliable digit counting in meters and mechanical counters.
@
Formline 3D
2 minute read